Projects item number 1
Short description of portfolio item number 1

Short description of portfolio item number 1
Short description of portfolio item number 2
Short description of portfolio item number 1
Short description of portfolio item number 2
Published in Proceedings of the International Micro Air Vehicle Conference and Competition, 2016
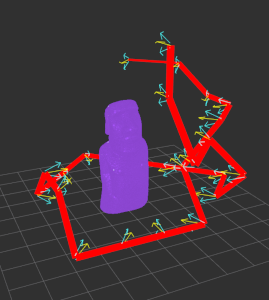
In this paper, we propose a coverage planning algorithm for inspecting an aircraft, using an Unmanned Ariel Vehicle (UAV). Inspecting structures (eg bridges, buildings, ships, wind turbines, aircrafts) is considered a hard task for humans to perform, and of critical nature since missing any detail could affect the structure’s performance and integrity. Additionally, structure inspection is a time and resource intensive task that should be performed as efficiently and accurately as possible. In this paper we introduce a search space coverage path planner (SSCPP) with a heuristic reward function that exploits our knowledge of the structure model, and the UAV’s onboard sensors’ models to generate resolution optimal paths that maximizes coverage. The proposed method follows a model based coverage path planning approach to generate an optimized path that passes through a set of admissible waypoints to fully cover a complex structure. The algorithm predicts the coverage percentage by using an existing model of the complex structure as a reference. A set of experiments were conducted in a simulated environment to test the validity of the proposed algorithm.
Recommended citation: R Almadhoun, T Taha, L Seneviratne, J Dias, G Cai,"Aircraft Inspection Using Unmanned Aerial Vehicles", Proceedings of the International Micro Air Vehicle Conference and Competition, 2016 http://RandaAlmadhoun.github.io/files/paper3.pdf
Published in 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), 2016
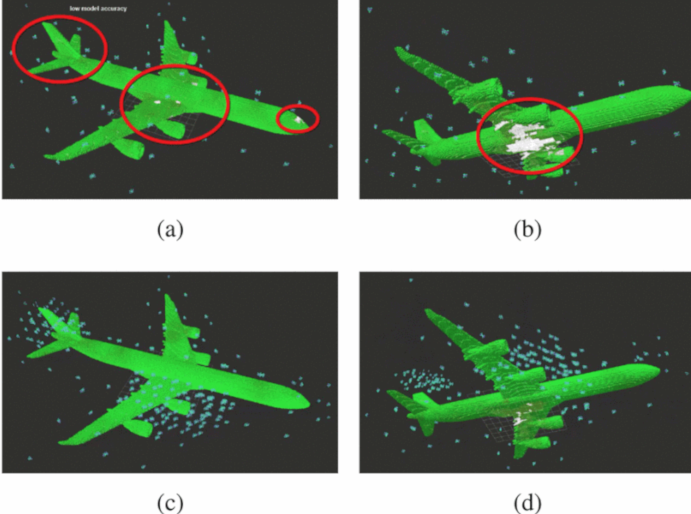
In this paper, we introduce a coverage path planning algorithm for inspecting large structures optimized to generate highly accurate 3D models. Robotic inspection of structures such as aircrafts, bridges and buildings, is considered a critical task since missing any detail could affect the performance and integrity of the structures. Additionally, it is a time and resource intensive task that should be performed as efficiently and accurately as possible. The method we propose is a model based coverage path planning approach that generates an optimized path that passes through a set of admissible waypoints to cover a complex structure. The coverage path planning algorithm is developed with a heuristic reward function that exploits our knowledge of the structure mesh model, and the UAV’s onboard sensors’ models to generate optimal paths that maximizes coverage and accuracy, and minimizes distance travelled. Moreover, we accelerated critical components of the algorithm utilizing the Graphics Processing Unit (GPU) parallel architecture. A set of experiments were conducted in a simulated environment to test the validity of the proposed algorithm.
Recommended citation: R. Almadhoun, T. Taha, L. Seneviratne, J. Dias and G. Cai, "GPU accelerated coverage path planning optimized for accuracy in robotic inspection applications," 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, 2016, pp. 1-4. http://RandaAlmadhoun.github.io/files/paper2.pdf
Published in International Journal of Advanced Robotic Systems, 2016
Advancements in robotics and autonomous systems are being deployed nowadays in many application domains such as search and rescue, industrial automation, domestic services and healthcare. These systems are developed to tackle tasks in some of the most challenging, labour intensive and dangerous environments. Inspecting structures (e.g. bridges, buildings, ships, wind turbines and aircrafts) is considered a hard task for humans to perform and of critical importance since missing any details could affect the structure’s performance and integrity. Additionally, structure inspection is time and resource intensive and should be performed as efficiently and accurately as possible. Inspecting various structures has been reported in the literature using different robotic platforms to: inspect difficult to reach areas and detect various types of faults and anomalies.
Recommended citation: Almadhoun, R., Taha, T., Seneviratne, L., Dias, J., & Cai, G. (2016). A survey on inspecting structures using robotic systems. International Journal of Advanced Robotic Systems. https://doi.org/10.1177/1729881416663664 http://RandaAlmadhoun.github.io/files/paper1.pdf
Published in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
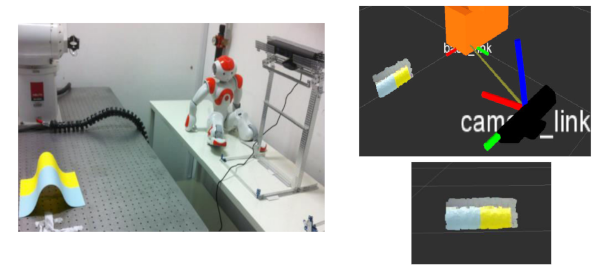
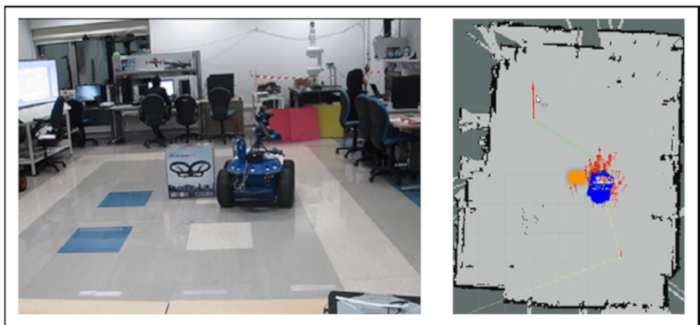
In this paper, we introduce a coverage path planning algorithm with adaptive viewpoint sampling to construct accurate 3D models of complex large structures using Unmanned Aerial Vehicle (UAV). The developed algorithm, Adaptive Search Space Coverage Path Planner (ASSCPP), utilizes an existing 3D reference model of the complex structure and the onboard sensors noise models to generate paths that are evaluated based on the traveling distance and the quality of the model. The algorithm generates a set of viewpoints by performing adaptive sampling that directs the search towards areas with low accuracy and low coverage. The algorithm predicts the coverage percentage obtained by following the generated coverage path using the reference model. A set of experiments were conducted in real and simulated environments with structures of different complexities to test the validity of the proposed algorithm.
Recommended citation: R. Almadhoun, T. Taha, D. Gan, J. Dias, Y. Zweiri and L. Seneviratne, "Coverage Path Planning with Adaptive Viewpoint Sampling to Construct 3D Models of Complex Structures for the Purpose of Inspection," 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018, pp. 7047-7054.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.