Search, Locate and Sample: Exploration and Intervention in search and rescue scenarios
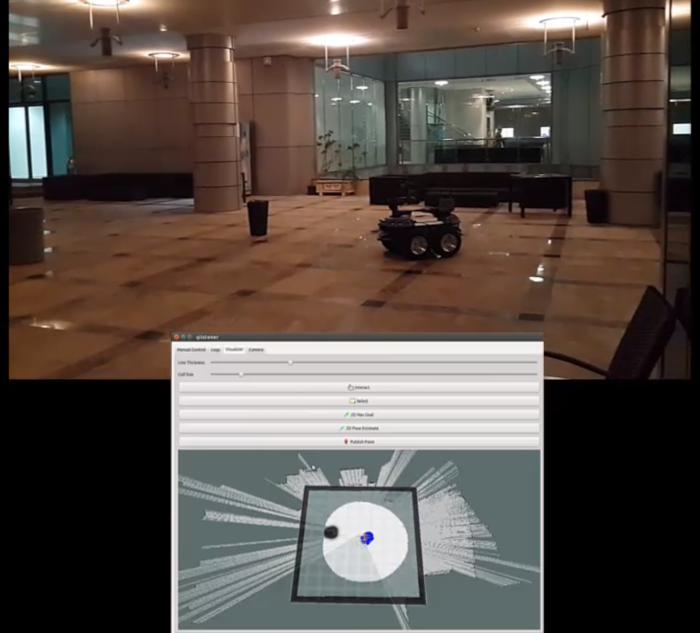
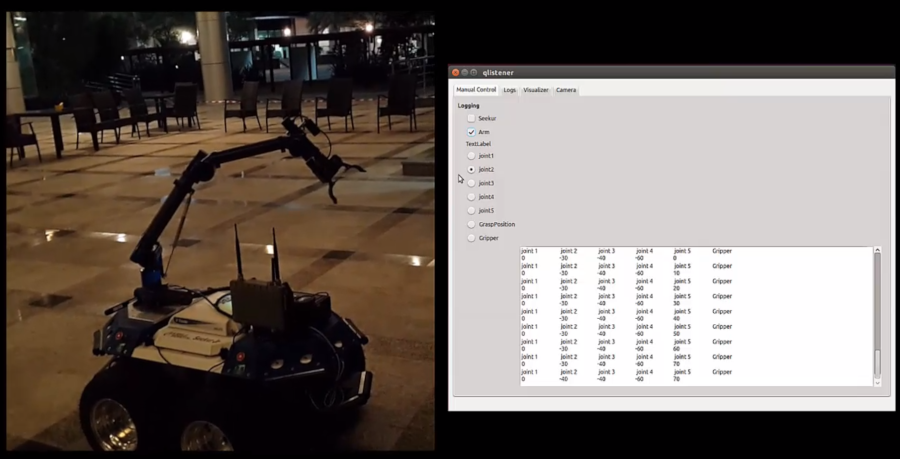
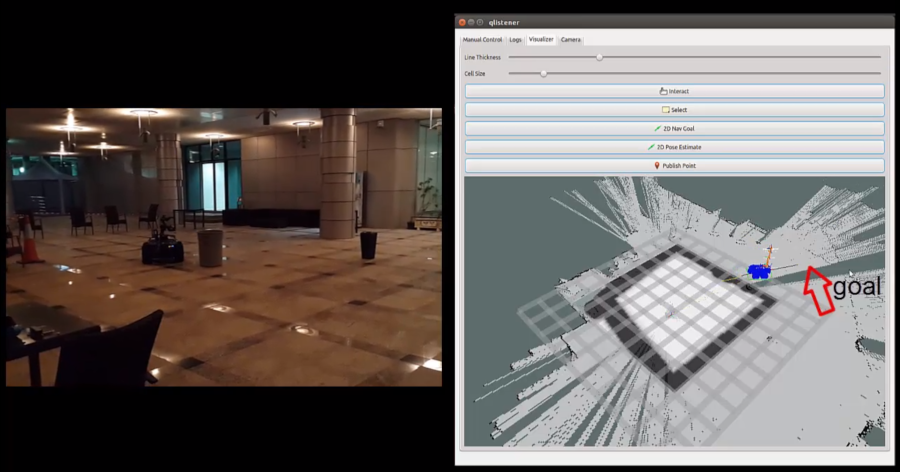
This project aims to develop a robotic system that allows the intervention, inspection and retrieval of samples from hazardous environments. This will save humans from such risky environments and help contain the damage. The proposed system consists of an unmanned ground vehicle (UGV) system equipped with a robotic manipulator arm as well as high precision sensors, an onboard processing power and wireless connectivity. In particular this project aims to design a robotic system that will be able to intervene in hazardous situations through different modes of operation. These modes include:
*Tele-operation of a vehicle for inspection by human operators in a hazardous environment *Tele-operation of a vehicle to navigate to a specific destination indicated in a map *Simi-autonomous sample, retrieval and grasping and also fully autonomous navigation, exploration and sample retrieval
pictures: