Grasping Different Objects Based on a Touch Based Analysis
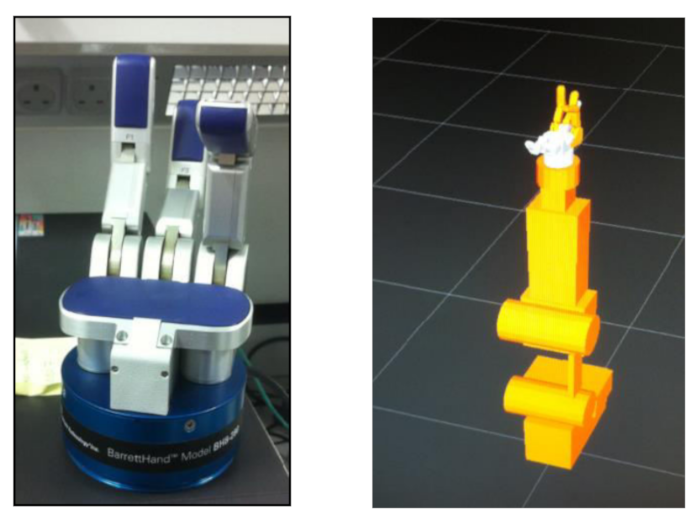
The main aim of this study is grasping objects with different natures and materials based on vision, tactile and force/torque sensory information. The system used in the study consists of a robotic manipulator arm, a robotic hand equipped with tactile sensor, force/torque sensor and a vision sensor. Mitsubishi RV-6SDL, a high precession 6DoF industrial robotic arm, and Barrett Hand BH280, a multi fingered programmable grasper with tactile sensor at each finger and at the palm, were chosen to assist in the implementation of this study. In addition to this, different sensors were used including Net F/T system (force/torque sensor) and the Kinect RGB-D camera. The problem at hand is concerned with perception and grasping, and thus the focus of the study will be on the following robotics technical areas:
- Segmentation
- Object clustering
- Sensor fusion
- Object classification
- Grasping
pictures: