Randa Almadhoun
A highly motivated researcher with passion for emerging technologies, and with good communication and presentation skills, a hard worker and team player. My main research interests include autonomous systems development, machine learning, robotic vision and navigation, and cloud computing. Additionally, I have worked as a teaching assistant for six years during my masters and PhD studies where I taught different topics and assisted in many practical and programming labs. I gained many leadership and transferable skills not only throughout my research work but also through the participation in technical competitions like MBZIRC in Abu Dhabi, and Drones for good in Dubai, and WRO (Jakarta). Also being involved in many local and abroad conferences (IROS 2018 - Madrid Spain) enhanced my communication and presentation skills. I was involved in different real experimentation utilizing different types of robots which enhanced my problem-solving skills, planning skills, software troubleshooting skills.
Projects Overview
Multi-robot Coverage Path Planning for Model Reconstruction and Mapping
August 2017 – June 2021 (PhD)
The project focusses on enhancing the Coverage Path Planning by dividing the effort on a team of robots instead of using one robot taking into consideration several aspects including: distance, energy, and accuracy. Model-based and non-model based approaches are being explored using a team of UAVs.
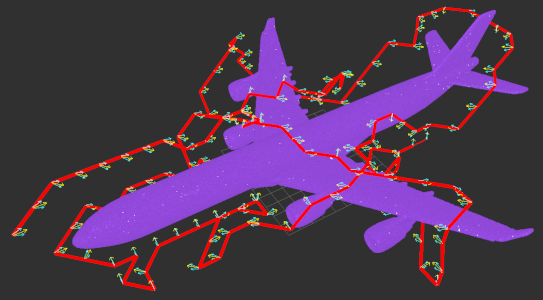
Coverage Path Planning for Inspecting Large Structures Using Unmanned Ariel Vehicles (UAVs)
Jun 2015 – Dec 2016 (Masters)
Master’s Thesis project that study the problem of large structures inspection such as aircraft, bridge and buildings. UAV platform is used in this project to follow a generated path that fully covers the 3D structure in order to gather data for performing accurate 3D reconstruction. The developed algorithm is a model based algorithm that performs coverage path planning to generate a trajectory that guarantees coverage and accuracy to certain resolution.
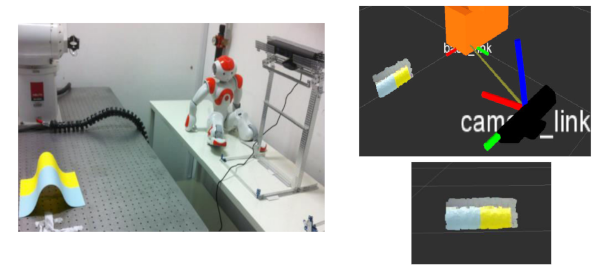
Grasping Different Objects Based on a Touch Based Analysis
Sep 2014 – Dec 2014
Independent study research titled “Grasping Different Objects Based on a Touch Based Analysis” performed using Mitsubishi manipulator arm and Barrett Robotic hand available in KURI lab
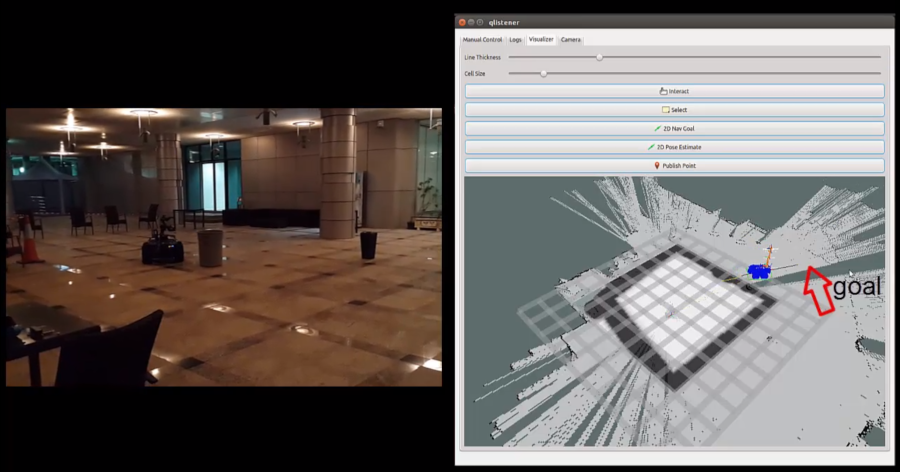
Search, Locate and Retrieve samples from search and rescue scenarios
Jan 2014 – Dec 2014
Senior Design Project titled “Search, Locate and Retrieve samples from search and rescue scenarios” in partnership with the Robotics Institute of Khalifa University, the focus of this project is to deliver a mobile autonomous system using Seekur Jr. Robot where a lot of robotics concepts are used including navigation, exploration, path planning, grasping, vision, image processing, and object recognition.
Exploration using Seekur UGV